

MECS-CROP
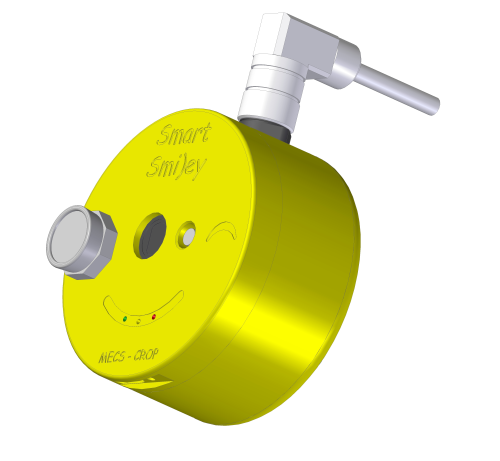
MECS-CROP¹ (Micro Environment and Canopy Sensor, versione CROP) è un sensore multiparametrico sviluppato specificamente per la caratterizzazione dello sviluppo vegetativo e del micro-ambiente di colture a campo aperto in fila (pomodori, mais, etc.).
MECS-CROP è stato sviluppato e brevettato da TEAM, il raggruppamento di imprese (Studio di Ingegneria Terradat, Appleby Italiana, Casella Macchine Agricole) nato nel 2009 con lo scopo di fornire al settore agricolo soluzioni di agricoltura di precisione “chiavi in mano”, dal rilevamento del dato, al suo processamento e successiva gestione tramite dispositivi elettronici, fino alle macchine agricole appositamente dedicate ad attività in campo di tipo VRT (Variable Rate Technology).
Il software di postprocessing dei dati, MECS-MAPS, trasforma i dati registrati dal sensore, memorizzati in file di log, in una serie di livelli informativi in forma di mappe tematiche sovrapponibili tra di loro. Sempre tramite il software MECS-MAPS l'utente può utilizzare le mappe prodotte a partire dai log registrati dal sensore al fine di produrre programmi di lavoro per attività di tipo VRT in campo con l'ausilio di macchine agricole abilitate alla tecnologia VRT (spandiconcime, spandiletame/spandicompost, barre da diserbo, irrigatori, ripper per interramento liquami, macchine raccoglitrici, etc.).

L'ambizione che ha originato la progettazione e realizzazione di
MECS-VINE è quella di riuscire a produrre mappe tematiche con livello
di significatività quantomeno analogo e di dettaglio addirittura
superiore a quello precedentemente possibile solo tramite l'utilizzo di
dati multispettrali da satellite, superando nel contempo i limiti
operativi dei sensori di prossimità sin qui presenti sul mercato,
limiti che hanno di fatto reso impossibile il loro utilizzo estensivo
con modalità semplici ed affidabili.
Dal punto di vista dell'utente, risulta di sicuro interesse anche la
possibilità di realizzare in completa autonomia e senza alcuna
limitazione sia i rilievi dei propri appezzamenti sia la successiva
attività di postprocessing finalizzata alla produzione delle mappe
tematiche.
MECS-VINE integra un ricevitore GPS ed una serie di sensori in grado di
rilevare i seguenti parametri: Canopy Index (CI)², temperatura
ambiente, temperatura superficiale della parete, umidità relativa.
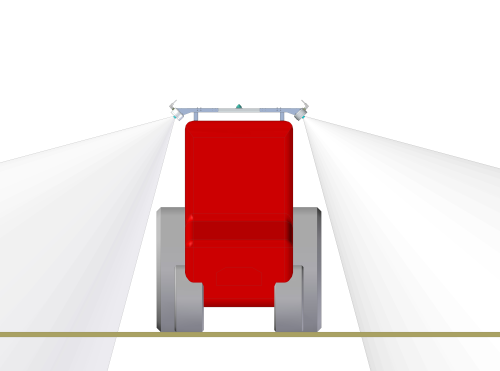
La
particolare orientazione del sensore e le sue caratteristiche in
termini di geometria della ripresa permettono di abbracciare una
larghezza fino a 20 m in senso trasversale alla direzione di
avanzamento del trattore. Le letture di Canopy Index del sensore sono
inoltre del tutto insensibili alle differenze di illuminazione della
parete vegetata (presenza/assenza di nubi, altezza e angolazione del
sole, ombreggiamento, etc.).
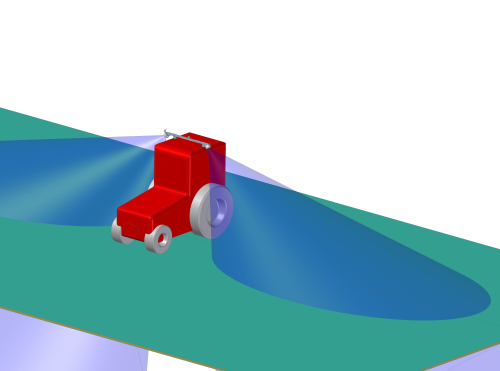
MECS-VINE può anche essere utilizzato per il controllo in tempo reale
di macchine a tecnologia VRT: in tal caso il dato letto dal sensore
posto davanti al trattore viene utilizzato per modulare l'intensità
dell'intervento della macchina operatrice (atomizzatore, cimatrice,
defogliatrice, etc.) posta sul retro del trattore stesso.
Sia nel caso di applicazioni VRT con dati relativi a rilievi effettuati
precedentemente con il sensore, sia nel caso di applicazioni VRT con
controllo in tempo reale, i differenti livelli informativi possono
essere utilizzati in modo indipendente oppure combinato, rendendo così
possibili strategie di agricoltura di precisione infinitamente più
sofisticate ed efficaci di quanto sinora possibile.
[1] PATENT PENDING.
[2] Il Canopy Index (CI) misurato dal sensore MECS-VINE è un dato adimensionale variabile tra 0 e 1000 che può essere direttamente correlato a variabili fisicamente basate quali LAI (Leaf Area Index), TRV (Tree Row Volume), etc. Sono in corso sperimentazioni con Università e Centri di Ricerca finalizzate alla certificazione di tali correlazioni.